QU'EST-CE QUE TU CHERCHES?

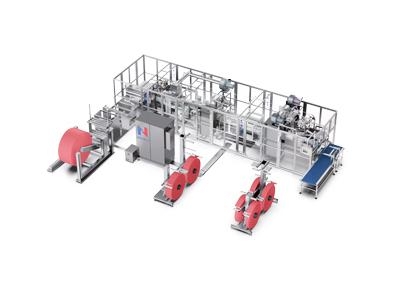
Machine de palettisation et de chargement de ciment en sacs


Le système de chargement automatique de la machine de palettisation et de chargement de ciment en sacs Factory Gachn adopte la technologie de numérisation 3D, qui permet de localiser et de numériser avec précision la forme extérieure du véhicule afin d'obtenir une position de chargement précise, un verrouillage interactif entre le système de chargement et la machine d'emballage, et un chargement automatique.
Nom du produit :
Bagged Cement Palletizing And Loading MachineNuméro d'article :
FK008-IICommande (MOQ) :
1Paiement :
30% advance payment, 70% balance before shipment or negotiableOrigine du produit :
xiamen,chinaPort maritime :
XIAMEN or Or according to your needsDélai de mise en œuvre :
3 monthsMachine de palettisation et de chargement de ciment en sacs
Le ciment ensaché quittait initialement l'usine principalement par chargement manuel ou à l'aide d'équipements semi-automatiques, et la réception des matériaux nécessitait une main-d'œuvre importante. Face à la pénurie de main-d'œuvre et à la hausse des coûts salariaux, les entreprises ont besoin de systèmes de chargement entièrement automatisés pour remplacer le travail manuel et ainsi réduire leurs dépenses. Lors de l'ensachage du ciment, les travailleurs évoluent dans un environnement fortement poussiéreux, ce qui les expose à des maladies professionnelles telles que la pneumoconiose.

Le robot chargeur est en réalité l'application d'un manipulateur au système d'ensachage de ciment. Ce manipulateur offre un contrôle précis, ce qui permet d'améliorer l'efficacité, de réduire la pénibilité du travail, d'améliorer l'environnement de travail et de diminuer la consommation d'énergie. Son utilisation a libéré la main-d'œuvre et a joué un rôle important dans le développement du secteur. Le chargeur de ciment entièrement automatique peut s'adapter à différents types de véhicules et effectuer un chargement automatique. Son système de reconnaissance utilise un laser et un scanner 3D pour obtenir les informations relatives au véhicule, tandis que le système de positionnement obtient sa position grâce à plusieurs capteurs laser. Le robot exploite ces informations pour saisir, planifier et ensacher automatiquement les sacs de ciment.
Principe de fonctionnement deAgent du système de chargement automatique de ciment en sacs Chargeur de ciment Gachn gourp
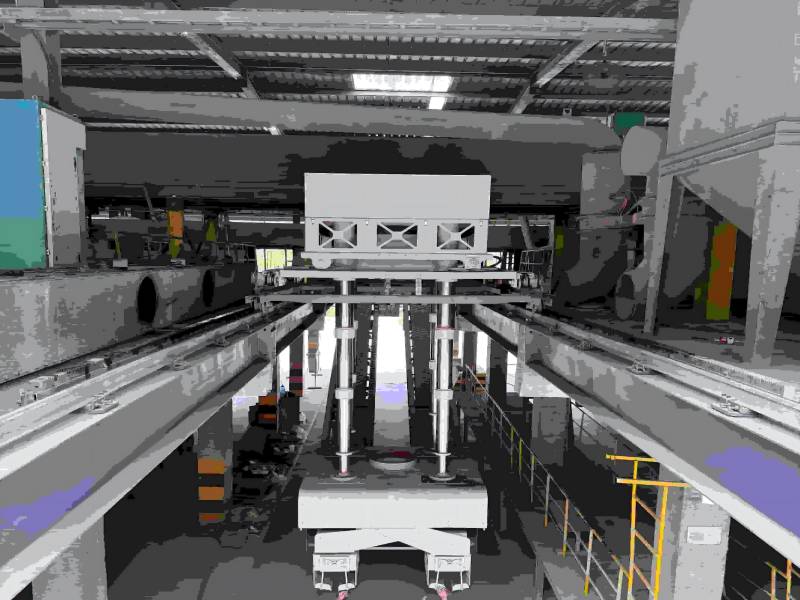
Le système de chargement et de palettisation automatique de sacs de ciment de l'usine Gachn utilise la technologie de numérisation 3D. Celle-ci permet de localiser et de scanner avec précision la forme extérieure du véhicule afin d'assurer un positionnement de chargement précis, une interconnexion interactive entre le système de chargement et la machine d'emballage, et un chargement automatique. La capacité du chargeur Gachn à se déplacer librement dans un espace réduit est due à l'utilisation d'un palan doté d'un mécanisme télescopique tridimensionnel, permettant un contrôle précis et un fonctionnement coordonné des axes X, Y et Z.
système d'élimination de poussière
Le système de chargement automatique de ciment en sacs Dealer Gachn est équipé d'un système de dépoussiérage comprenant une hotte, une canalisation et une machine de dépoussiérage, ce qui réduit considérablement la poussière générée lors du chargement. La plupart des cimenteries disposent déjà d'un système de dépoussiérage ; seule la modification des canalisations est nécessaire avant utilisation.
Le dépoussiéreur peut traiter un volume d'air allant jusqu'à : 100 000 m³/h

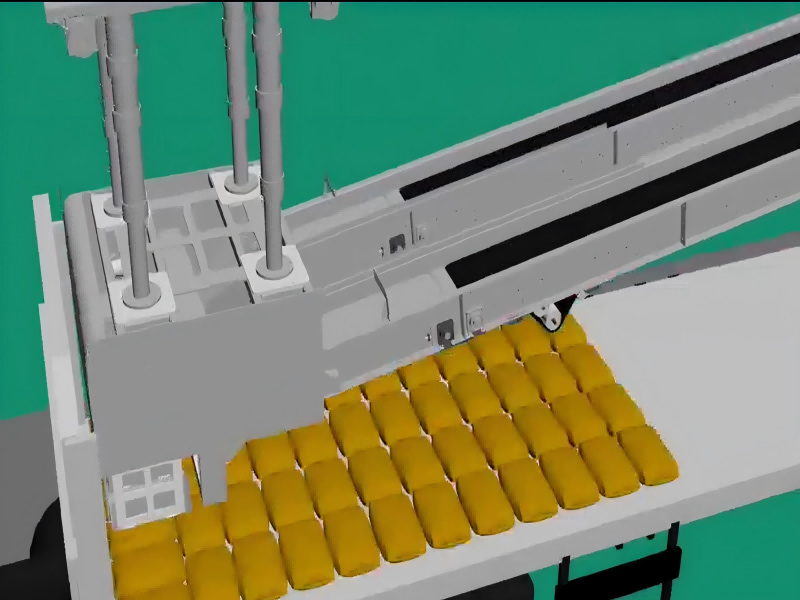
Le chargeur automatique de ciment Gachn gourp peut effectuer l'emballage
1. Matériau de chargement : ciment en sacs
2. Spécifications du ciment en sacs : 50 kg/sac, 650 mm (longueur) × 400 mm (largeur) × 140 mm (épaisseur)
3. Vitesse d'ensachage de la machine d'emballage : 120 t/h
4. Capacité du chargeur automatique : ≥ 90 t/h
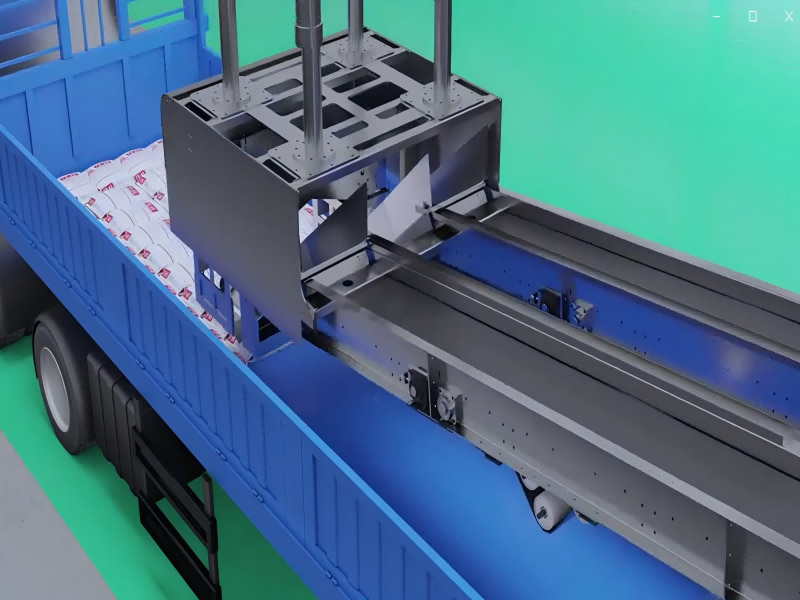
Chargement de l'hôte
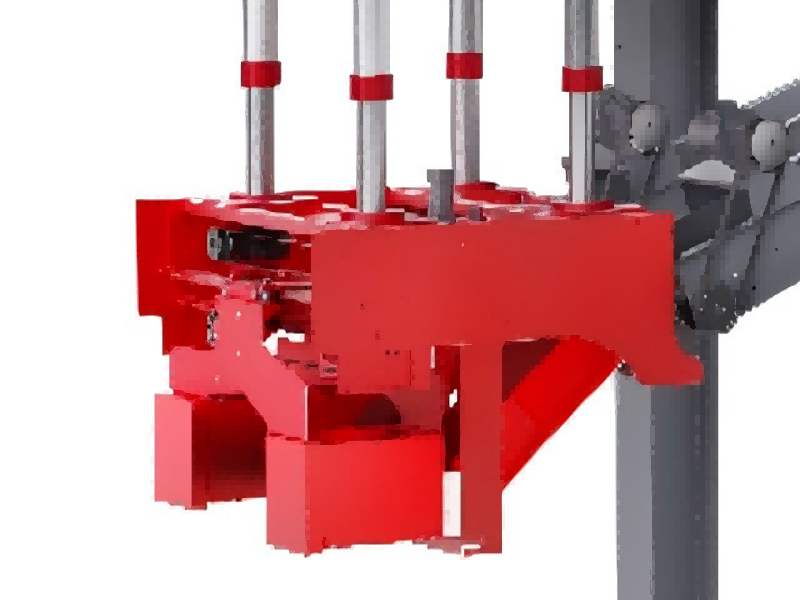
Le système de dépoussiérage situé à l'avant du robot chargeur comprend un dispositif de fixation de tuyau télescopique, une conduite d'air télescopique, une goulotte de dépoussiérage, une conduite d'air verticale de dépoussiérage et d'autres éléments. La conduite d'air verticale de dépoussiérage et l'avant du robot pénètrent entièrement dans le compartiment de chargement, garantissant ainsi un dépoussiérage rapide et efficace.
Système de numérisation de véhicules (numérisation 3D)
Le système de numérisation 3D des chargeuses de groupe Gachn permet non seulement de scanner et d'identifier la structure du véhicule, mais aussi de numériser le réservoir de carburant situé sur la paroi avant du compartiment et les bâches enroulées de certains véhicules. Il peut également identifier les compartiments à l'aide de barres d'arrimage. Grâce à un calcul interne, le système établit la disposition optimale pour le chargement des compartiments, permettant ainsi le calcul automatique du chargement secondaire.
Groupe d'armoire de commande et capteur :
Le groupe de commande et de capteurs du chargeur robotisé comprend principalement une armoire de commande de mouvement avec écran LED, une console de commande tactile à réinitialisation automatique/manuelle, un système d'affichage et de décodage vidéo intégré, un système audio, une caméra numérique haute définition réseau, un câblage spécifique au robot, des capteurs (détecteur d'identification continue des colis, détecteur d'entrée de colis, détecteur de sous-colis, détecteur de position), un système de refroidissement automatique de l'armoire de commande et d'autres composants. Cette solution permet une intégration entre les systèmes sur site et le cloud, et la mise en place d'une plateforme intelligente pour chargeurs et d'un réseau 5G assure le partage des systèmes et une gestion hiérarchisée, offrant ainsi les conditions nécessaires à la construction intelligente des cimenteries.
Logiciel système :
Le logiciel système est principalement divisé en logiciel système intégré et en logiciel de lecture de cartes, et permet la modélisation intelligente et l'algorithme de mouvement adaptatif.
Le logiciel système intégré du robot chargeur comprend un logiciel de numérisation, un logiciel de pilotage, un logiciel de commande automatique des capteurs de levage, un logiciel de commande automatique du convoyage, un logiciel de commande du système de chargement intelligent, un logiciel de commande du système de base, un logiciel de commande automatique du chargeur et d'autres systèmes logiciels. Ce système logiciel, basé sur le logiciel de commande du système de base et le logiciel de pilotage, assure la numérisation des informations de la caisse du véhicule (y compris la mise en tension), le levage sur l'axe Z, les déplacements sur les axes X et Y, le convoyage par bande, le chargement intelligent, etc.
Le logiciel de lecture de cartes du chargeur robotisé est divisé en deux parties : le logiciel de lecture de cartes et le logiciel de lecture de cartes d'identification. Ces deux parties fonctionnent conjointement. Lorsque le véhicule passe la carte deux fois avec succès, son poids de chargement est converti en nombre de sacs chargés par l'ordinateur interne, et les informations relatives au nombre de sacs sont importées dans le système de contrôle du chargeur robotisé via le logiciel. Le robot émet alors les instructions précises concernant la quantité à charger.
Effet de l'application :
Comme le démontre l'efficacité du chargement après l'utilisation du robot chargeur par notre entreprise, ce dernier a parfaitement intégré l'architecture de plateforme cloud du chargeur intelligent. Cette architecture combine plateforme locale et plateforme cloud, et permet un service de chargement à distance intelligent et un partage des opérations. L'utilisateur peut ainsi résoudre les pannes du chargeur sur site, tandis que le fabricant peut intervenir à distance et rapidement pour résoudre les problèmes techniques rencontrés par les utilisateurs.


La machine automatique de palettisation et de chargement de ciment en sacs du groupe Gachn possède de nombreuses technologies brevetées.
La technologie de chargement segmenté exclusive de Gachn-JEENAR résout efficacement le problème du chargement des véhicules trop longs.

La machine automatique de palettisation et de chargement de sacs de ciment Ganchn-JEENAR ne nécessite qu'un entretien facile, ce qui réduit les coûts et le temps de maintenance.
La machine de palettisation et de chargement de ciment en sacs GACHN - JEENAR offre une grande adaptabilité : elle gère facilement tous les types de camions, y compris les modèles ferroviaires.

La tête de la machine du système de chargement automatique de ciment en sacs du groupe Gachn peut être étendue dans le chariot pour empiler les sacs en position basse, réduisant ainsi la poussière et la casse des sacs.
La machine de palettisation et de chargement de sacs Gachn dispose d'une interaction de données en temps réel : elle s'appuie sur la technologie de l'Internet des objets pour réaliser la collecte et l'analyse des données en temps réel.
Numérisation 3D d'un système de chargement automatique de ciment en sacs pour tous types de véhicules.
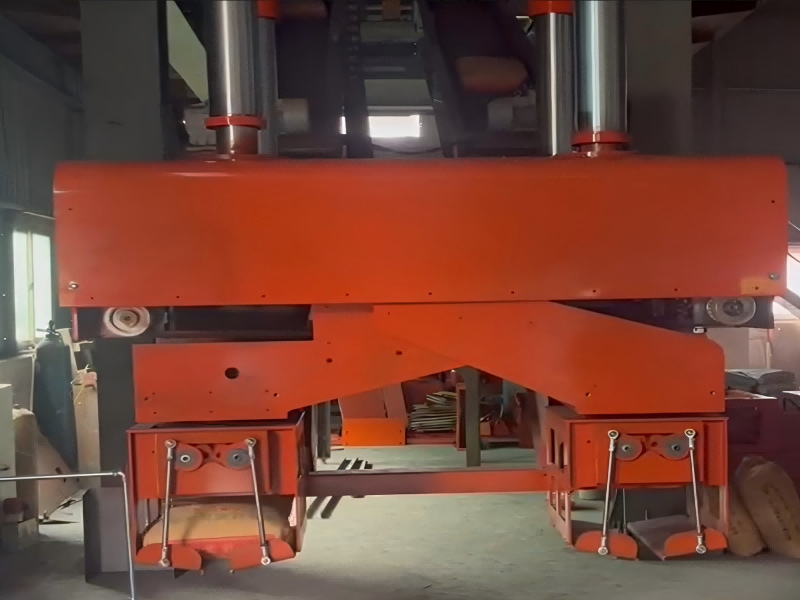
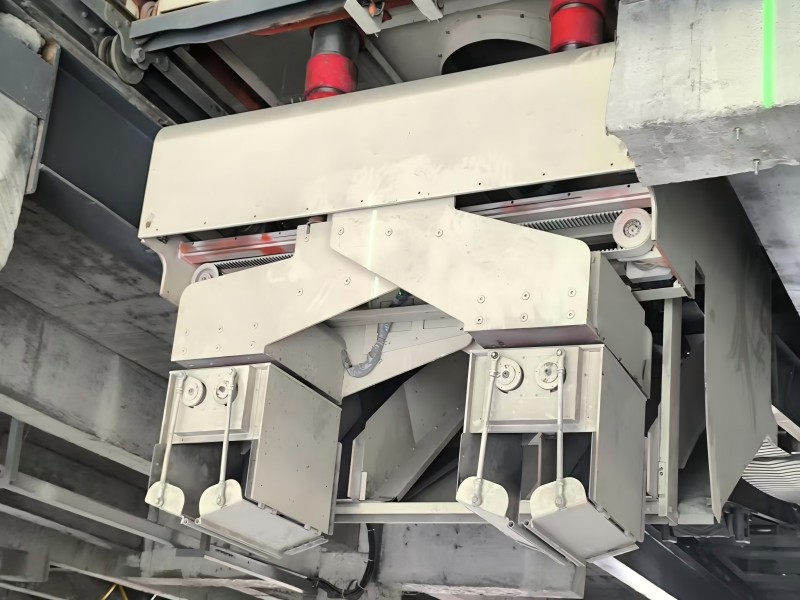
Conception de la tête d'ensachage double Gachn-JEENAR : mouvement latéral libre, près du chariot pour l'ensachage.
Abonnez-vous pour recevoir les dernières actualités. Restez informé(e) des dernières tendances.
 IPv6 RÉSEAU PRIS EN CHARGE 闽ICP备20010238号-3
IPv6 RÉSEAU PRIS EN CHARGE 闽ICP备20010238号-3